[서울파이낸스 나민수 기자] 동국대학교는 이진우 기계로봇에너지공학과 교수와 여운홍 조지아공과대학 교수가 사용자 의도대로 움직이는 착용 로봇을 개발했다고 22일 밝혔다.
이진우 교수 연구진과 여운홍 교수 연구진은 사용자의 근전도 신호를 인공지능으로 분석해 사용자의 상체 움직임 의도를 미리 예측해 상체 근력을 보조하는 외골격 로봇을 개발했다. 근전도(Electromyography)란 근육의 전기적 활동을 측정하는 방법인데, 근육의 수축과 이완 중에 발생하는 전기적 활동을 기록한다.
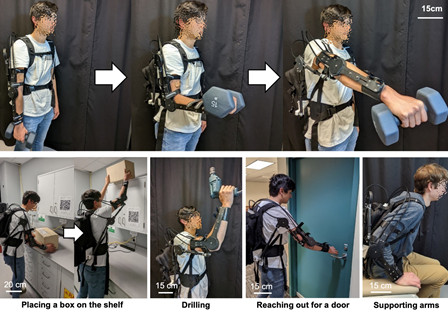
공동연구진은 몸에 부착해 근전도 신호를 측정할 수 있는 바이오패치를 자체 개발했고, 이 바이오패치에서 수집한 상체 근전도 신호와 딥러닝 기술을 활용, 사용자가 어떤 상체 움직임을 평균 200 – 250 밀로 초 안에 예측할 수 있도록 했다. 파악한 사용자 상체 움직임 의도를 유압 기반 착용형 로봇을 이용해 상체 움직임을 보조했다. 착용형 로봇은 입지 않았을 때와 비교 시, 평균 5.15 배의 근력 보조를 할 수 있는 것으로 확인됐다.
이진우 교수는 "이번 연구는 인공 지능, 바이오 전자, 로봇을 통합한 우수한 사례"라며 "앞으로 더욱 더 활발한 연구 활동을 통해서 인류의 편의성에 이바지할 계획"이라고 밝혔다.
한편, 이번 연구는 국제학술지 NPJ Flexible Electronics 2024년 2월 온라인 게재 (DOI: 10.1038/s41528-024-00297-0, 논문명: Intelligent upper-limb exoskeleton integrated with soft bioelectronics and deep learning for intention-driven augmentation)됐다.
